Research Solution
연구용 AI 로봇팔 세트
상위·하위 제어를 한 번에, 토크 레벨까지 직접
GPU·AI 연산·제어 SW를 통합한 제어기 + 로봇팔, 한 세트로. 셋업이 아니라, 연구부터 바로 시작하세요.

상위·하위 제어 한 번에
토크 레벨 개방 · 제어 알고리즘 직접 구현
GPU 통합 제어기
AI 추론 + 1kHz 제어 한 박스
멀티 로봇 제어 가능
1대 → 4대
PLEM Lab GUI 탑재
실제 로봇 움직임을 게인·실험·비교, 한 화면에서
구성 제품은 연구비 집행 상황에 맞춰 유연하게 견적해 드립니다.
사용 중인 대학·연구실



연구실에 필요한 것을 한 세트로
상위 + 하위 제어 모두
비전·AI 추론 같은 상위 제어와 모터·토크 단의 하위 제어를 한 세트 안에서 모두 다룹니다. 연구 주제에 따라 상위·하위 어느 층이든 직접 커스터마이징합니다.
하위 제어 알고리즘 직접 커스터마이징
PID·ADRC가 기본 내장되어 있고, 제어 루프는 닫혀 있지 않습니다. 동역학 모델(URDF·중력)에 접근해, 아래 알고리즘을 1kHz 실시간 토크 루프에서 직접 구현합니다 (C++ 플러그인·Python, 예제 제공).
GPU와 실시간 제어가 한 박스
AI 추론(NVIDIA Jetson GPU)과 1ms 실시간 제어가 한 박스 안에서 함께 돕니다. GPU 워크스테이션을 따로 사서 제어기와 엮는 통합 작업 없이, Docker·연구 환경까지 미리 세팅돼 옵니다.
멀티로봇 확장 (1대 → 4대)
로봇 1대 구성부터 시작해, 동일한 전장 구조로 4대까지 확장할 수 있습니다. 멀티로봇·협조 제어 연구에 그대로 대응합니다.
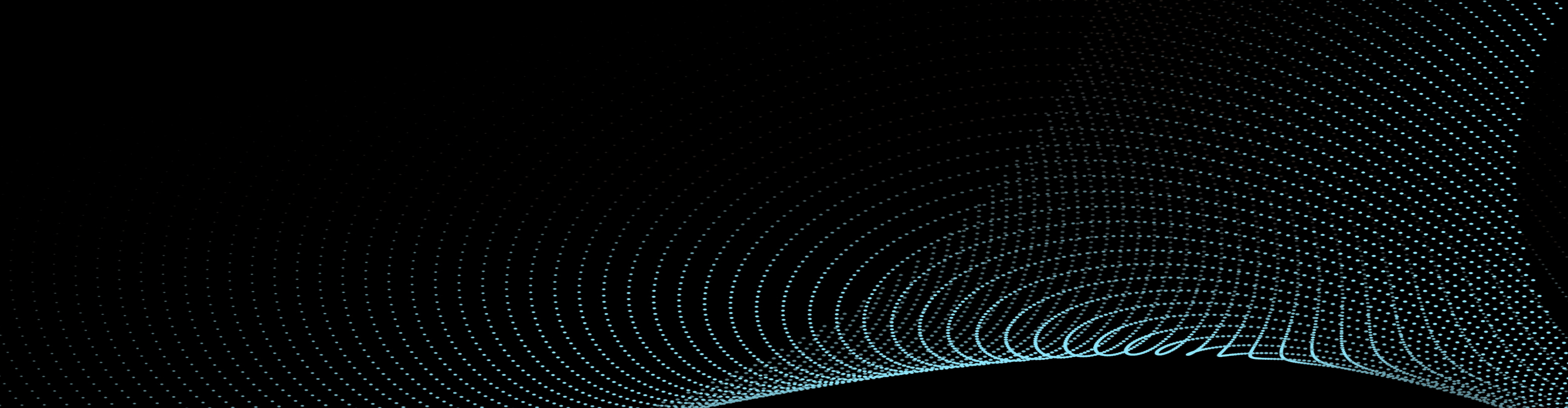
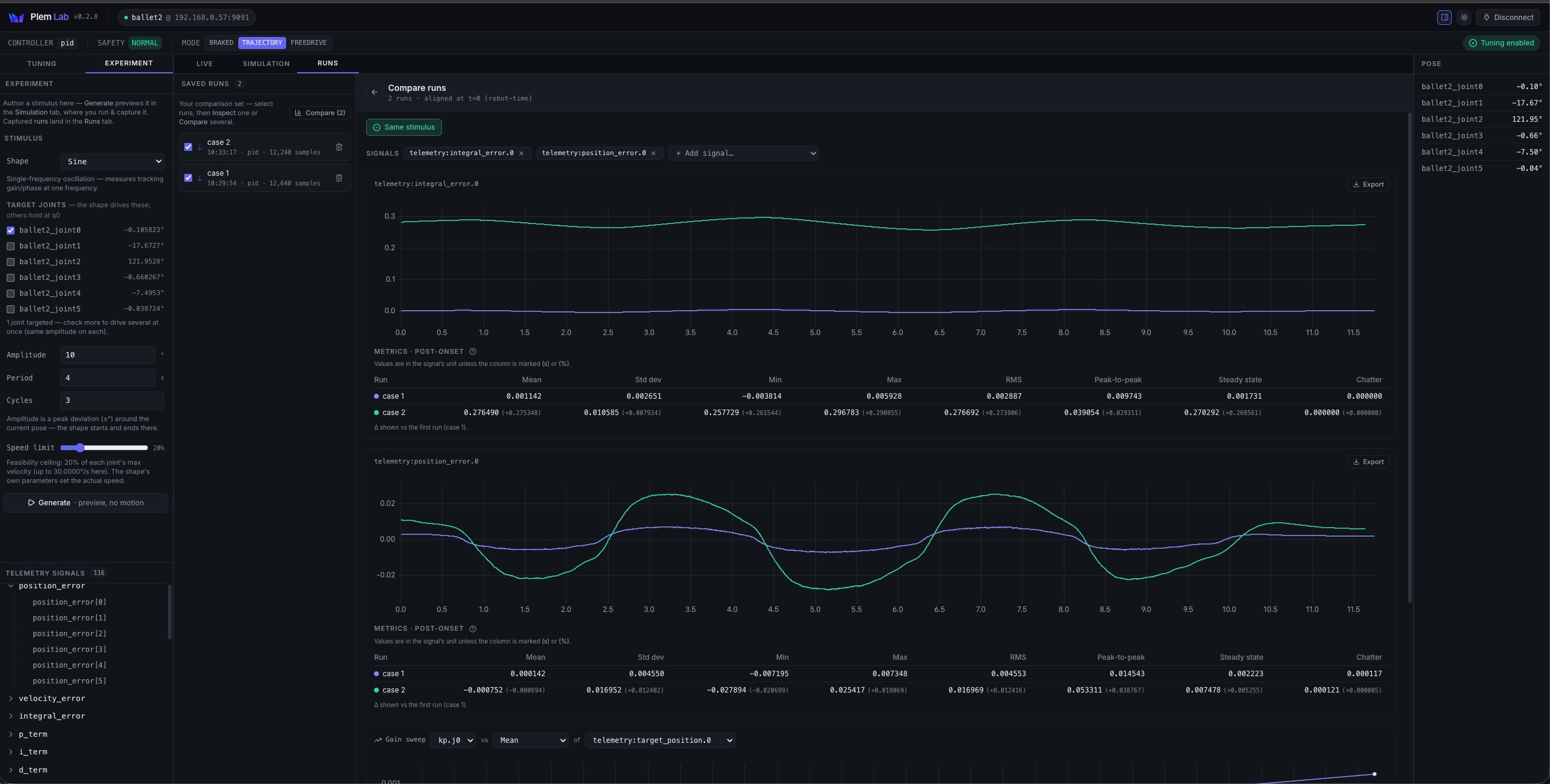
PLEM Lab · 튜닝 워크벤치 GUI
실제 로봇으로 바로 튜닝, 상위·하위 커스터마이징
연구용 세트에는 로봇 제어 워크벤치 PLEM Lab이 포함됩니다. 게인 튜닝, 실험 설계, 시뮬레이션 검증, Run 비교를 한 화면에서. 셋업이 아니라 연구부터 바로 시작하세요.
감이 아니라 데이터로 튜닝합니다
실시간 튜닝 & 모니터링
관절별 게인을 조정해 즉시 적용. 위치·속도·오차·토크 등 telemetry 100여 종을 실시간 차트로.
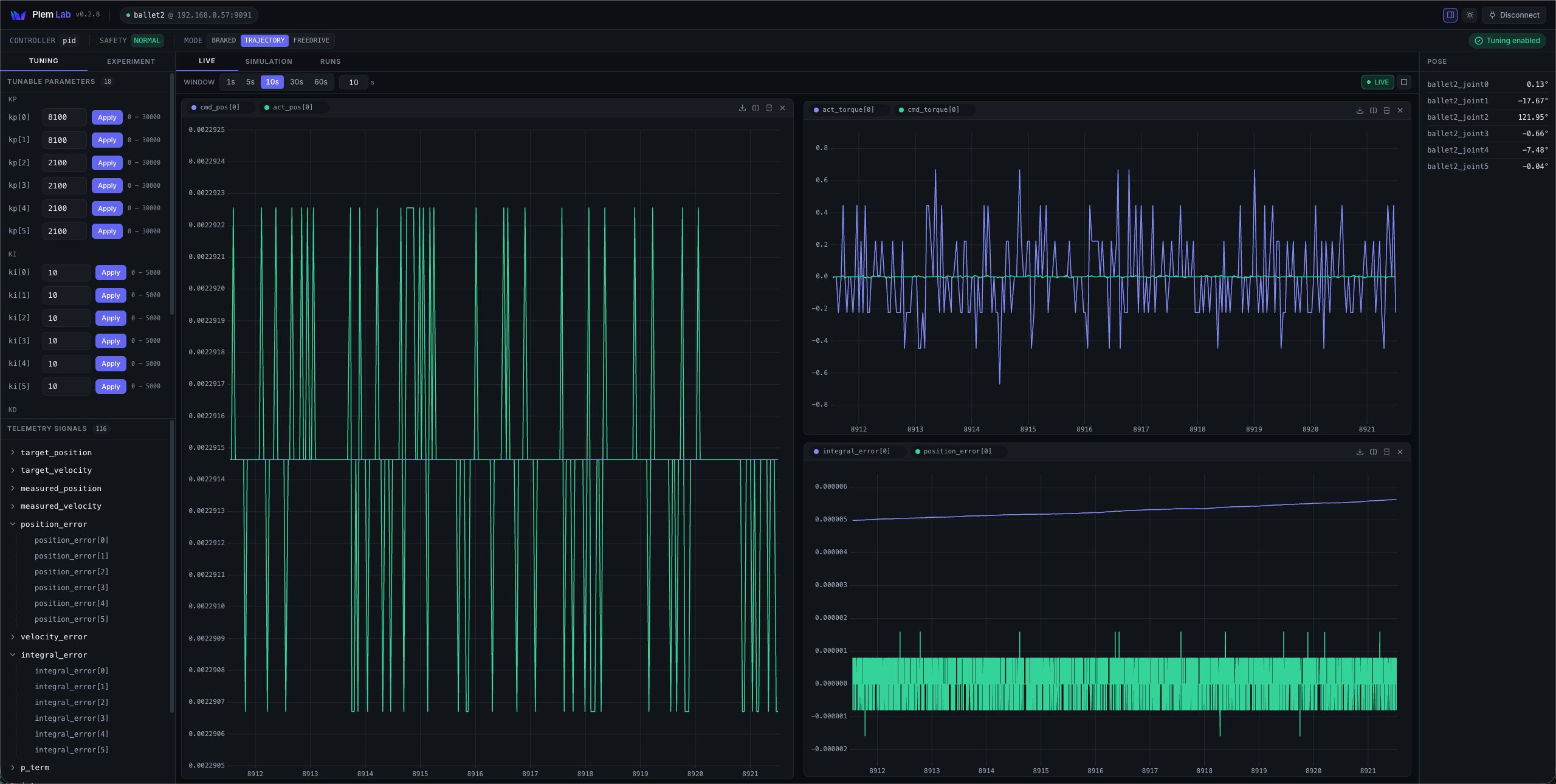
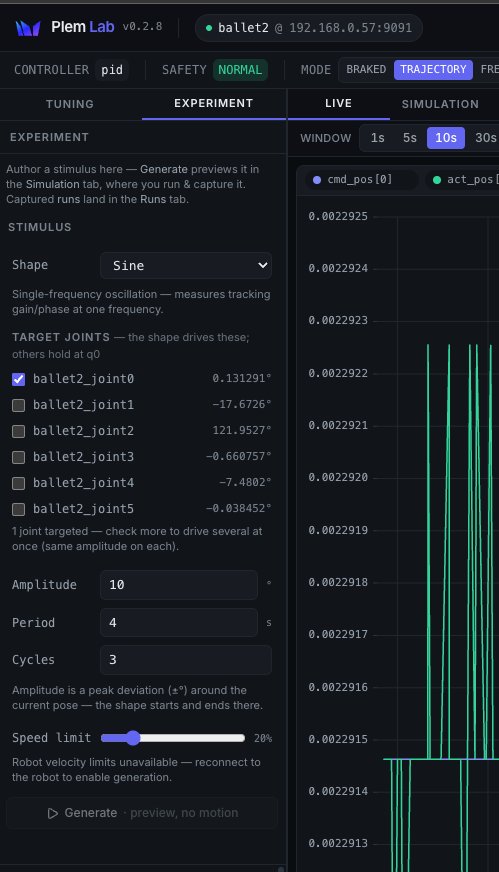
실험 설계 & 시뮬 검증
Stimulus를 직접 설계하고, 실제 구동 전 3D 시뮬로 실행 가능성을 먼저 판정.
기록되고 비교되는 Run
모든 실행에 파라미터가 함께 남아, 변경과 결과의 인과를 나란히 비교.
커스텀 컨트롤러 지원
화면의 PID는 예시입니다. 직접 구현한 제어기를 그대로 올려 동일 워크플로로 실험.
토크 레벨까지 직접 구현하는, 닫혀 있지 않은 제어 루프. 연구 주제에 맞춰 상위·하위 어느 층이든 커스터마이징합니다.
연결 → 튜닝 → 실험 설계 → 시뮬 검증 → 실행·캡처 → 비교

기술 사양
로봇 팔 — 예시: INDY7
- 자유도
- 6 (revolute)
- 가반하중
- 7 kg
- 최대 도달거리
- 1.3 m
- 반복정밀도
- ±0.1 mm
- 관절 속도
- 150–180 °/s
- 툴 속도
- 1 m/s
- 무게
- 28 kg
예시 구성 — 야스카와·두산·커스텀 등 다른 로봇팔도 지원
제어기 — WIM Robot Controller
- SoC
- NVIDIA Jetson Orin AGX
- AI 연산
- 275 TOPS (INT8)
- 메모리
- 64GB LPDDR5
- 제어 주기
- 1 ms (1kHz) · 지터 ±4.1μs
- 동시 제어
- 128축
- 통신
- EtherCAT · EtherNet/IP · Modbus TCP
- I/O
- 디지털 입력 8 · 출력 8 (EtherCAT 확장)
- 네트워크
- 5× 1Gbps · Wi-Fi · BT
- 비상정지
- max 16.32 ms (KIRIA 인증)
- 전원
- 90–264 VAC (Universal)
- 크기 · 무게
- 238 × 352 × 207 mm · < 11 kg
소프트웨어 · 제어 — PLEM
- 플랫폼
- PLEM (ROS 2 네이티브)
- 경로 계획
- MoveIt 2 + cuMotion
- 제어 계층
- 상위(비전·AI) + 하위(토크 레벨) 동시
- 제어 알고리즘
- PID·ADRC 내장 + 커스텀 토크 플러그인 (예제 제공 가능)
- 모니터링
- 관절 위치 · 속도 · 토크
- AI 배포
- Docker 컨테이너 · 모델 배포
- 멀티로봇
- 1대 → 4대