왜 기존 로봇 제어기로는 부족할까?
하드웨어 분리
GPU(AI)와 PLC(제어)가 분리 → 통신 지연, 동기화 문제
소프트웨어 파편화
로봇마다 다른 OS·드라이버 → 개발 비용 증가
복잡한 시스템
별도 배선, 외부 PC 필요 → 모바일/소형 로봇 구현 제약
유지보수 분산
IPC·PLC·SW 업체 각각 관리 → 장애 시 원인 파악 지연
하나의 박스로 모든 것을 해결
기존에는 하드웨어(IPC + PLC) 구매, 소프트웨어 설치, 드라이버 설정, 통신 연결을 따로 해야 했습니다. WIM Robot Controller는 이 모든 것이 하나의 박스에 들어 있습니다.
NVIDIA Jetson Orin AGX 기반 제어기
275 TOPS 연산, 128축 동시 제어를 단일 모듈로 처리 EtherCAT·EtherNet/IP·Modbus TCP 지원으로 모든 산업 환경에 즉시 연결
JETSON ORIN 기반
275TOPS
연산 성능
128축
동시 제어
1ms
제어 주기
<11kg
무게
EtherCAT
산업용 실시간
Ethernet
1Gbps
Wi-Fi · BT
무선 연결
I/O 32포트
In 16 / Out 16
PLEM — ROS 2 기반 로봇 SW 플랫폼
Preempt RT 커널, EtherCAT 드라이버, cuMotion 모션 플래닝이 기본 탑재되어 개봉 즉시 C++/Python으로 개발을 시작할 수 있습니다.
풀스택 통합의 진짜 의미
시스템 온 칩(SoC)으로 CPU, GPU 통신 병목을 제거하고, RT 프로세스는 CPU 코어를 고립시켜 간섭 없이 1ms(1kHz) 정주기성을 보장합니다. 소프트웨어가 하드웨어를 알고, 하드웨어가 소프트웨어에 최적화된 구조입니다.
CPU
RT 프로세스가 CPU 코어를 고립시켜 1ms 정주기 보장
하나의 칩, 두 개의 역할
AI와 제어가 동시에 돌아갑니다.
Unified Memory
GPU ↔ CPU 복사 없이 직접 공유
64GB
GPU
AI 추론과 비전 처리를 하나의 GPU에서 실시간 수행
하나의 칩, 두 개의 역할
AI와 제어가 동시에 돌아갑니다.
Unified Memory
GPU ↔ CPU 복사 없이 직접 공유
CPU
RT 프로세스가 CPU 코어를 고립시켜 1ms 정주기 보장
GPU
AI 추론과 비전 처리를 하나의 GPU에서 실시간 수행
Robot Software Platform
PLEM
레이어를 호버하여 구조를 살펴보세요
Robot Software Platform
PLEM
레이어를 호버하여 구조를 살펴보세요
소프트웨어 구성
로봇 제어 핵심 라이브러리
코어 라이브러리(궤적, 위치/토크 제어), 하드웨어 통신 라이브러리, 상하위 통합 인터페이스, 센서 캘리브레이션, 커스텀 가능 제어 알고리즘
AI / Physical AI 라이브러리
캘리브레이션, CUDA/TensorRT 최적화, 컨베이어 트래킹
산업용 통신 드라이버
EtherCAT Master, I/O Control, 다축 동기화
개발자 도구 & API
REST API, CLI 도구, 로깅, 모니터링 대시보드
ROS 2 기반, PLEM이 추가하는 가치
기존 ROS 2의 한계를 넘어, 산업 현장에 즉시 투입 가능한 완벽한 개발 환경을 제공합니다.
실시간 제어
ROS 2 (기본)
별도 RTOS 구성 필요
+ PLEM
✓산업용 실시간 제어 네이티브 내장
AI 통합
ROS 2 (기본)
외부 패키지 개별 설치
+ PLEM
✓CUDA/TensorRT 기본 탑재
배포
ROS 2 (기본)
colcon build + 의존성 관리
+ PLEM
✓Docker 컨테이너 원클릭 배포
하드웨어 추상화
ROS 2 (기본)
HAL 직접 개발
+ PLEM
✓표준 추상화 API 제공
초기 설정
ROS 2 (기본)
환경 구축에 수일 소요
+ PLEM
✓5분 만에 개발 시작
산업용 통신
ROS 2 (기본)
추가 패키지 필요
+ PLEM
✓EtherCAT Master 기본 내장
기술 사양
HARDWARE
SOFTWARE
주요 기능
Pick-and-place Trajectory
- 구간 기반 이동 및 속도(가속도) 제어
- Pick-and-place 이동 곡선 r-value 변경
- Cubic spline trajectory
- Conveyor tracking
- Position control, Torque control
- Place home designation (homing)
- Coupling / Decoupling
Input/Output Control
- Conveyor encoder control
- Solenoid valve control
Calibration
- Robot Calibration
- Vision-robot calibration
AI 로봇 제어에 필요한 모든 것을 하나의 박스에
| 비교 항목 | 기존 분리형 | WIM Robot Controller (통합형) |
|---|---|---|
| 제어 개발 기간 | EtherCAT 연결, 서보 튜닝, 실시간 보장 직접 구현 → 6개월~2년 | ✓기본 탑재 — 개봉 즉시 동작, 개발 기간 대폭 단축 |
| 제어 안정성 | OS 간섭으로 제어 주기 흔들림 → 정밀 작업 리스크 | ✓1kHz 실시간 제어 — 제조·정밀 작업 적용, 항공우주 분야 진입 추진 |
| 시스템 복잡도 | IPC + PLC + GPU 분리 → 디버깅 포인트 다수, 장애 원인 파악 어려움 | ✓단일 박스 통합 — 장애 지점 최소화, 유지보수 단순화 |
| 개발 리스크 | 제조사마다 다른 환경 → 로봇 바꿀 때마다 재학습 | ✓표준 환경 제공 — 코드 재사용, 로봇 교체 시에도 이식 가능 |
| 기술 자산 | 블랙박스 컨트롤러 → 고객 노하우가 벤더에 종속 | ✓표준 통신 인터페이스 — 다양한 로봇 브랜드 호환 |
제어 개발 기간
EtherCAT 연결, 서보 튜닝, 실시간 보장 직접 구현 → 6개월~2년
✓기본 탑재 — 개봉 즉시 동작, 개발 기간 대폭 단축
제어 안정성
OS 간섭으로 제어 주기 흔들림 → 정밀 작업 리스크
✓1kHz 실시간 제어 — 제조·정밀 작업 적용, 항공우주 분야 진입 추진
시스템 복잡도
IPC + PLC + GPU 분리 → 디버깅 포인트 다수, 장애 원인 파악 어려움
✓단일 박스 통합 — 장애 지점 최소화, 유지보수 단순화
개발 리스크
제조사마다 다른 환경 → 로봇 바꿀 때마다 재학습
✓표준 환경 제공 — 코드 재사용, 로봇 교체 시에도 이식 가능
기술 자산
블랙박스 컨트롤러 → 고객 노하우가 벤더에 종속
✓표준 통신 인터페이스 — 다양한 로봇 브랜드 호환
나에게 맞는 WIM Robot Controller 구성 찾기
해당하는 항목을 체크하세요. WIM 엔지니어링 팀이 최적의 구성을 제안해드립니다.
구성 방식
개발 환경
로봇 선택
용도
추가 옵션
실제 적용 사례
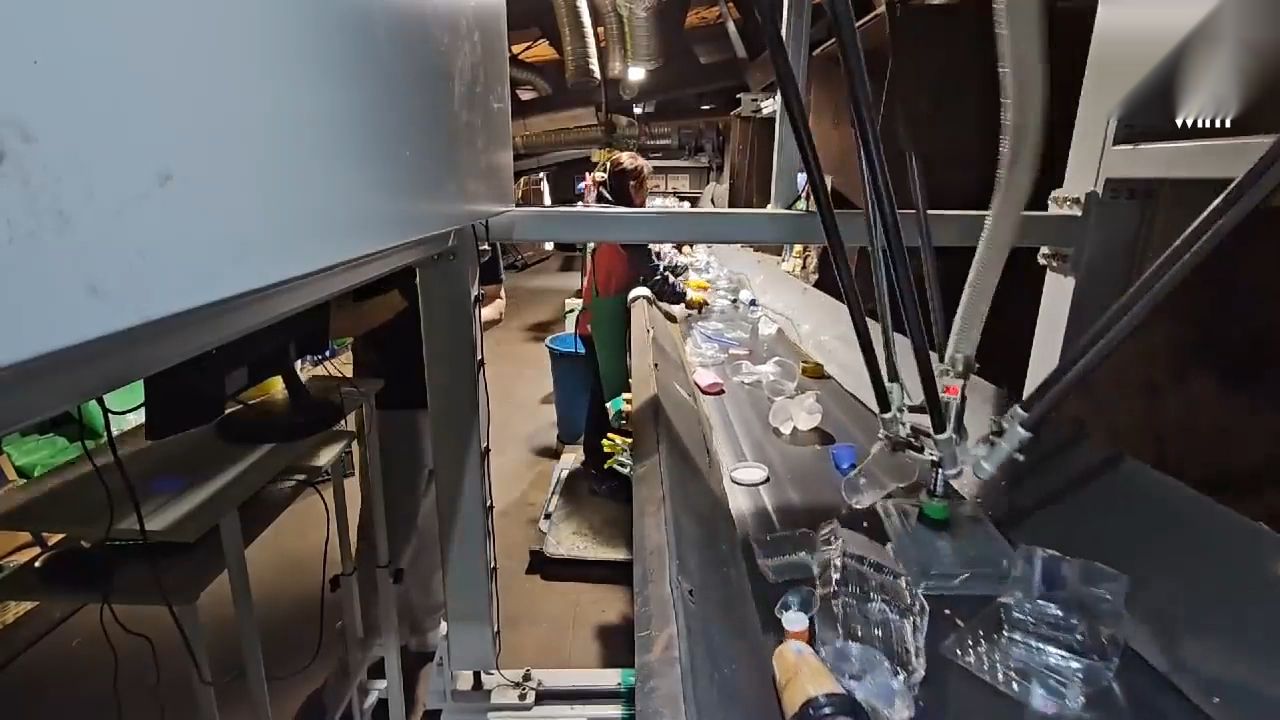
폐기물 분리수거
AI 비전 기반 재질·형태 분류 및 자동 선별

작물 수확
AI 숙성도 판별 기반 비정형 환경 자율 수확
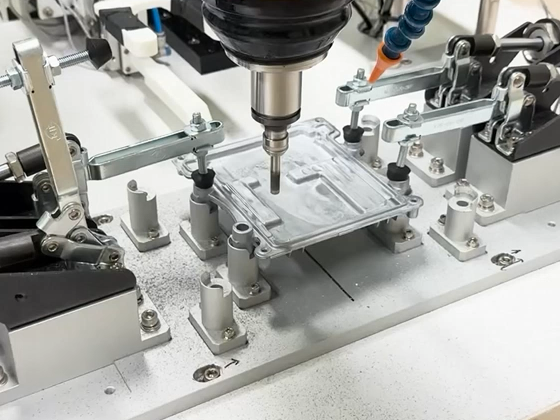
부품 가공
정밀 위치 제어와 실시간 품질 검사 자동화
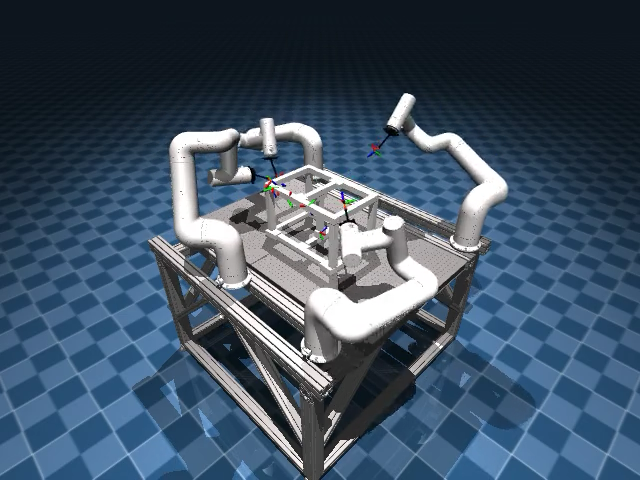
멀티 로봇 시뮬레이션
복수 로봇 협조 제어 시뮬레이션 및 최적화
자주 묻는 질문
제어기 개발 회사라는 것은 하드웨어 회사인가요, 소프트웨어 회사인가요? 보유 핵심 기술은 무엇인가요?+
당사는 SoC 기반 RTOS 제작을 포함하여 AI 로봇 개발을 위한 전 과정의 SW 기술을 보유하고 있습니다. (Full-Stack)
로봇 제어기의 '두뇌'인 SoC 위에서 실시간으로 정밀한 동작을 보장하는 전용 운영체제(RTOS) 제작 기술과, 로봇을 움직이고(Move), 보고(Vision), 생각(AI)하게 만드는 데 필요한 모든 A-to-Z 소프트웨어 기술을 보유하고 있습니다.
고객사가 당사의 기술을 쉽게 사용할 수 있도록 판매합니다.
보유한 우수한 풀스택 기술을 고객사가 편하게 가져다 쓸 수 있도록 제공합니다. 고객은 당사가 제공하는 환경 위에서 자신이 만들고 싶은 핵심 기능(AI 솔루션)만 개발하면 되므로, 개발 시간과 비용을 획기적으로 줄일 수 있습니다.
SoC 칩을 활용한다면, 각 제조사마다 장단점이 있지 않나요? 특정 제조사 칩만 사용 가능한가요?+
현재는 NVIDIA사의 칩을 사용하고 있으며, 이는 GPU 병렬처리 환경 구축을 위한 선택입니다.
AI 로봇 개발에 필요한 범용 GPU 기반 병렬처리 환경을 가장 빠르게 구축할 수 있는 검증된 하드웨어로 시장에서 다수 사용하는 제품인 NVIDIA Jetson 시리즈를 채택하였습니다.
삼성 엑시노스 등 다양한 칩셋 제조사로 확장 적용을 계획하고 있습니다.
AI 로봇은 목적과 형태에 따라 다양한 용도가 있으며, 각 용도에 적합한 칩셋을 선택하여 사용할 수 있어야 합니다. 당사는 초고속 통신과 저전력에 강점을 가지는 Samsung Exynos 등 제조사의 제약 없이 당사 소프트웨어를 올릴 수 있도록 확장 개발하는 것을 사업 방향으로 추진하고 있습니다.
NVIDIA Jetson 시리즈의 단독 사용 방식과 비교하여 어떤 차별성이 있나요?+
Jetson은 훌륭한 '연산용 하드웨어'이지만, 그 자체로는 '실시간 로봇 제어기'가 될 수는 없습니다.
Jetson의 기본 OS는 실시간성을 보장하지 않아 정밀한 모터 제어가 불가능합니다. 대부분 기업들은 결국 외부 제어기를 추가하게 되고, 이는 다시 데이터 병목과 비용 증가 문제를 야기합니다.
당사는 Jetson이라는 고성능 SoC 위에서 연산과 실시간 로봇 제어를 동시에 수행하는 풀스택 솔루션을 제공합니다.
기존 방식 대비 어떤 장점을 얻을 수 있나요?+
타 솔루션에 의존하지 않고 기술 내재화가 가능해집니다.
내재화한 기술을 기반으로 유지보수 업체 비용을 낮추거나 혹은 자체 수행할 수 있습니다.
자체 데이터를 활용한 가장 최적의 솔루션 개발이 가능해집니다.
고객이 보유한 데이터를 가장 잘 분석, 관리하는 것은 고객사 자신입니다. 직접 AI 솔루션을 개발하고 로봇에 적용시키는 것이 가장 좋은 성능의 로봇을 만드는 방법입니다.
기존 방식과 어떤 차이점이 있나요?+
기존에는 로봇에 GPU가 존재하지 않았음
AI 로봇을 개발하기 위하여 제어기 외부에 GPU를 추가로 결합하는 방식을 사용하고 있으나, 이러한 방식을 사용하기 위해서는 GPU 드라이버, AI 관련 SW 라이브러리 및 프레임워크, 로봇과의 통신 등 다양한 작업이 필요합니다. 당사는 로봇 제어기에 GPU가 결합된 하드웨어를 사용하며, 다양한 고객사와 추진한 작업의 결과물을 보유하고 있으므로 고객사가 핵심 로직 개발에만 집중할 수 있도록 관련 개발 환경을 모두 제공합니다.
기존에는 특정 기업 로봇을 오직 해당 기업 제어기로만 제어할 수 있었음
당사 제어기는 ROS2를 지원하는 로봇 혹은 EtherCAT/CAN 통신이 지원되는 모터라면 모두 사용할 수 있는 범용성을 가집니다. 최근 다수 로봇 기업에서 ROS2를 지원하고 있으므로, 하나의 제어기를 활용하여 다양한 로봇을 제어하는 것이 가능합니다.
대다수 로봇 기업에서는 간단한 스크립트 수정만 허용하고 코드레벨 접근은 허용하지 않았음
코드레벨까지 모두 공개하여 개발자들이 높은 자유도를 바탕으로 개발할 수 있는 환경을 제공합니다.
1kHz 실시간 제어가 실제 현장에서 어떤 차이를 만드나요?+
1ms 주기, 지터 없는 제어
모터 명령을 1ms마다 지연·지터 없이 전달해, 고속 가공·정밀 조립·비전 추적 작업에서 경로 정확도를 유지합니다.
범용 OS 대비 안정성
일반 Linux/Windows 기반 컨트롤러는 OS 스케줄러 간섭으로 제어 주기가 흔들려 정밀 작업 리스크가 있지만, W-RC는 Preempt RT 커널 구조로 주기를 보장합니다.
275 TOPS라는 연산 성능이 실제 AI 추론에서 어떤 의미인가요?+
비전·제어 신경망 동시 구동
275 TOPS(INT8) 연산 성능으로 객체 인식·포즈 추정·경로 생성 등 여러 신경망을 외부 서버 없이 제어기 내부에서 동시 추론할 수 있습니다.
엣지 추론으로 통신 지연 제거
AI 추론과 모터 제어가 하나의 박스 안에서 이뤄져 외부 GPU 서버로의 왕복 지연이 사라지고, 실시간 폐루프(closed-loop) AI 제어가 가능합니다.