Products
AI 추론부터 실시간 제어까지 한 박스에
AI의 판단을 실제 움직임으로 바꾸는 실시간 토크 제어, WIM은 그걸 Jetson 단일 SoC 위에서 직접 구현해 이 제품들에 담았습니다.
WIM을 쓰면
약 3개월→약 3일*
제어 스택을 미리 통합하고 튜닝해, 한 박스에 담았습니다.
EtherCAT 마스터, 실시간 커널, 동역학 보상, 드라이브 프로토콜, AI·제어 리소스 배분까지 직접 쌓으면 수개월입니다. 하위 제어는 WIM이, 그 위엔 당신의 AI 모델과 데이터만.
직접 구축 (수개월)
WIM (통합·튜닝 완료)
직접 구축 (수개월)EtherCAT 마스터 + 모터·드라이브 매핑
통합 제공
직접 구축 (수개월)실시간 커널 + CPU 격리 (1ms / ±4.1µs 지터)
구현 완료
직접 구축 (수개월)중력·마찰·코리올리 보상
튜닝 완료
직접 구축 (수개월)드라이브별 CiA-402 프로토콜
표준화
직접 구축 (수개월)AI 추론과 제어 루프를 한 박스에서 충돌 없이
함께 구동
직접 구축 (수개월)로봇을 바꾸면 전부 다시
같은 구성 재사용
* 직접 구축 vs WIM 표준 구성(표준 로봇) 기준 일반적 추정. 커스텀 양산 하드웨어는 별도.
WIM의 기술 이야기를 만나보세요.
YouTube
YouTube
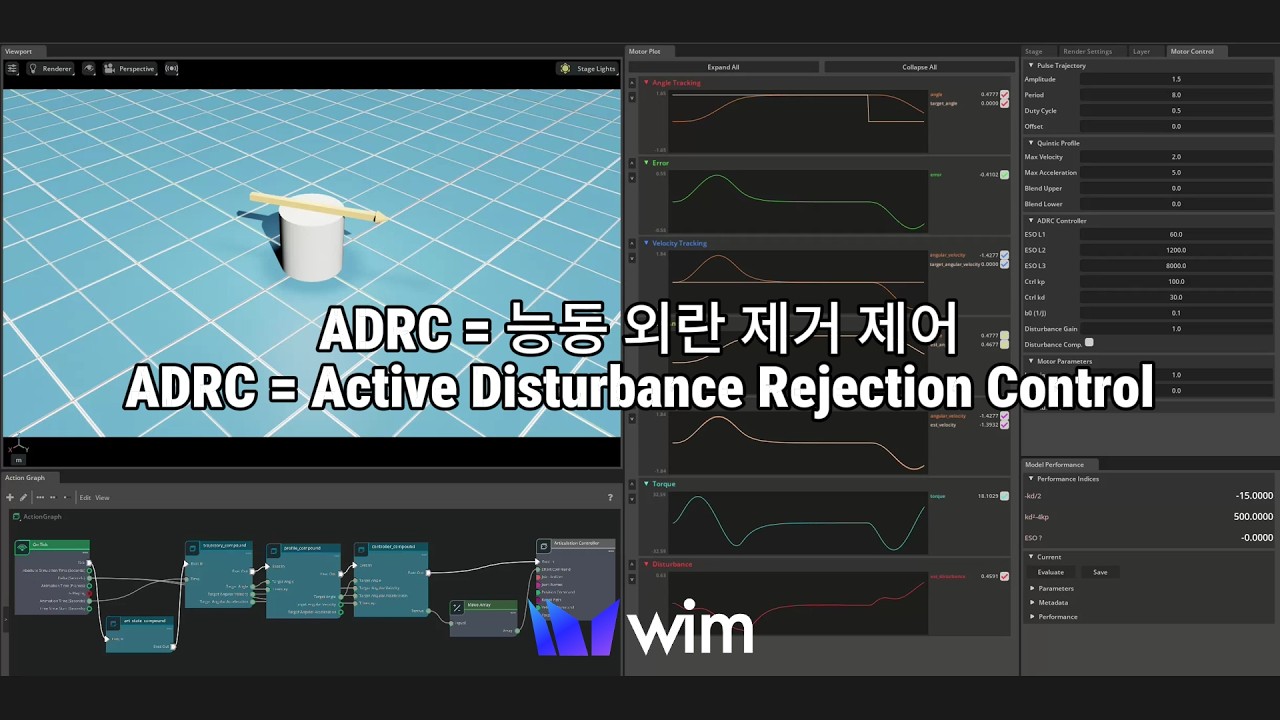
Sim2Real on a Real Robot: Isaac Sim-Tuned ADRC (Active Disturbance Rejection Control)
2026.06.15![[WIM Robotics] Multi Axis Motion Controller](https://i.ytimg.com/vi/IxpB-siA8RA/maxresdefault.jpg)
YouTube
[WIM Robotics] Multi Axis Motion Controller
2026.02.20![[WIM Robotics] Voice-controlled Robot Manipulation (Tablet Teaching)](https://i.ytimg.com/vi/OfBWUYKPgcg/maxresdefault.jpg)
YouTube
[WIM Robotics] Voice-controlled Robot Manipulation (Tablet Teaching)
2026.02.11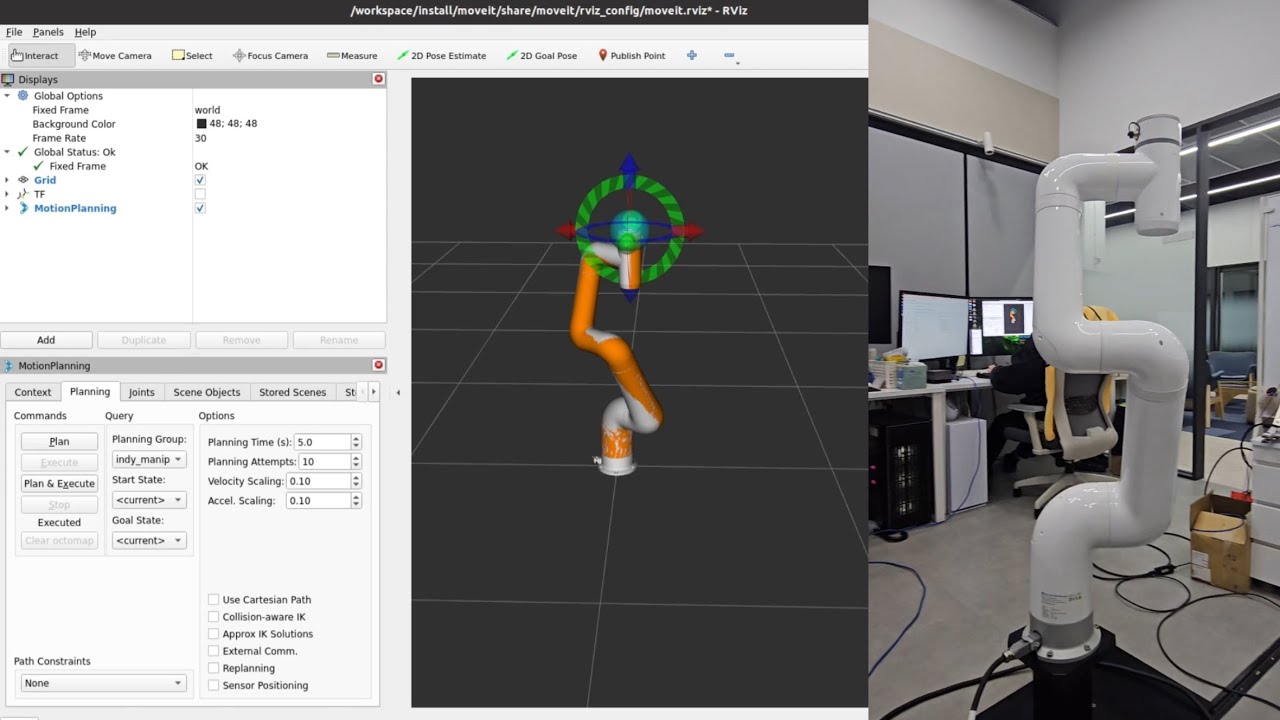
YouTube
No Robot Controller? Drive Any Robot Arm with Jetson | WIM Robotics
2025.12.05Tech Blog
강화학습 기반 하위 모터 제어: PID/ADRC를 넘어서
Tech Blog
강화학습 기반 하위 모터 제어: PID/ADRC를 넘어서
2026.03.03ARM64에서 std::memory_order의 실제 비용은 얼마인가? — Jetson Orin 실측 벤치마크
Tech Blog
ARM64에서 std::memory_order의 실제 비용은 얼마인가? — Jetson Orin 실측 벤치마크
2026.01.15
Tech Blog
템플릿 매칭의 진화: 픽셀 기반에서 딥러닝까지
2026.01.14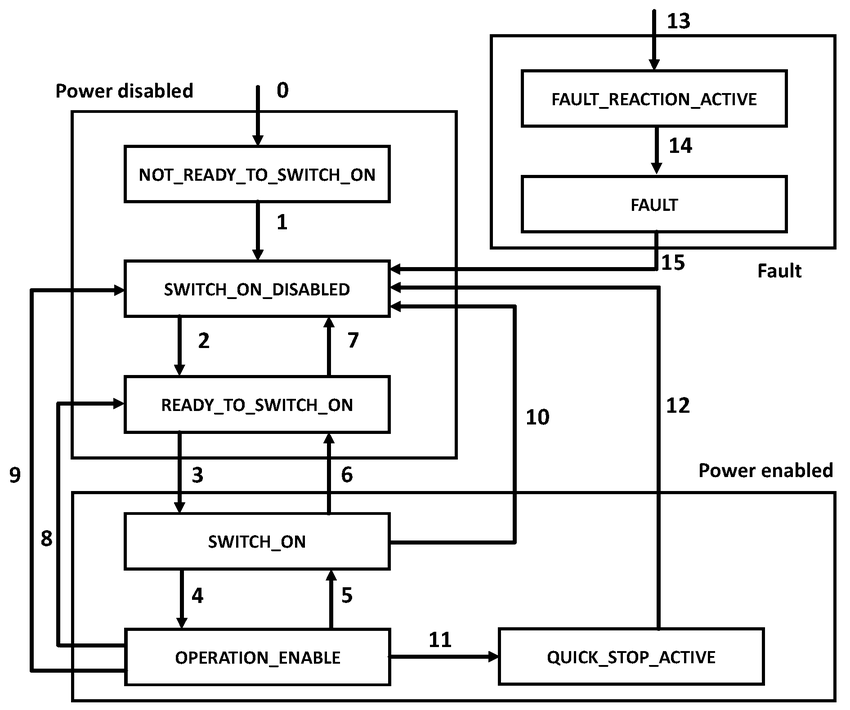
Tech Blog
모터 제어의 표준어: CiA402 프로필
2026.01.14Customer

















Supported by


















WIM이 걸어온 길

2026.04.23Award
WIM, KAIST '2026 초격차 스타트업 DIPS' 로보틱스 분야 선정기업 (2026.04)
주식회사 윔이 KAIST 글로벌기술사업화센터 주관 '2026년 초격차 스타트업 (DIPS) 프로젝트' 로보틱스 분야 선정기업에 이름을 올렸다. 이번 트랙은 로보틱스·첨단제조 분야 신규 33개사를 포함해 총 84개사를 본격 육성한다.
자세히 보기→
AI 로봇, 무엇이든 물어보세요
매니퓰레이터부터 이동로봇·휴머노이드까지 — AI 로봇과 관련된 문제라면 일단 가져오세요. WIM이 직접 할 수 있는 것과 연결해 드릴 수 있는 것을 찾아 가능한 답을 제시합니다. 제어는 우리의 가장 큰 강점입니다.